Figure 1 · MAISE framework overview
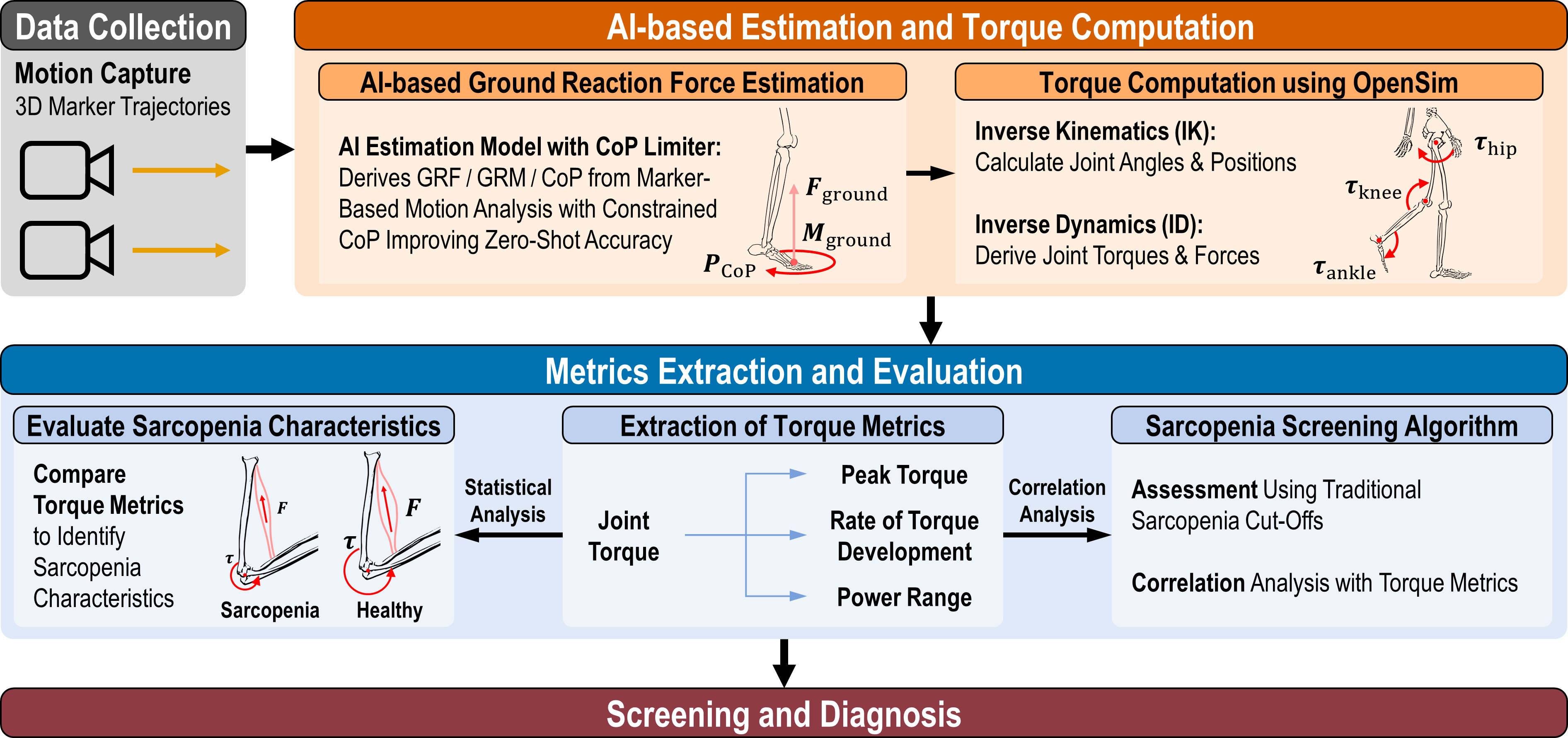
Figure 1 presents the overall framework of MAISE, showing how daily movement can be linked to lower-limb torque analysis for functional sarcopenia assessment.
A compact summary of Motion-AI Integrated Surveillance for the Elderly (MAISE) and the CoP-constrained GRF-estimation module implemented in this repository.
Sarcopenia is associated with falls, disability, hospitalization, and mortality, yet early assessment still depends largely on indirect measures that are difficult to deploy continuously. The paper proposes MAISE as a passive, camera-based framework that estimates lower-limb joint torque from natural daily movement.
To make that torque analysis feasible without force plates, the study introduces a CoP-Limiter that constrains the predicted center of pressure during ground reaction force estimation. The constraint keeps the estimate physically plausible and improves robustness on movements that were not seen during training.
In the older-adult evaluation reported in the paper, the framework was tested on four functional tasks that were not part of the training data. The resulting torque measures—Peak Torque, Rate of Torque Development, and Power Range—showed task-specific and joint-specific relationships with conventional sarcopenia indicators such as grip strength, gait speed, and chair-stand performance.
Selected figures from the paper summarize the clinical motivation of the study, the task protocol used for evaluation, and the torque-level findings that connect the framework to sarcopenia-related functional assessment.
Figure 1 presents the overall framework of MAISE, showing how daily movement can be linked to lower-limb torque analysis for functional sarcopenia assessment.
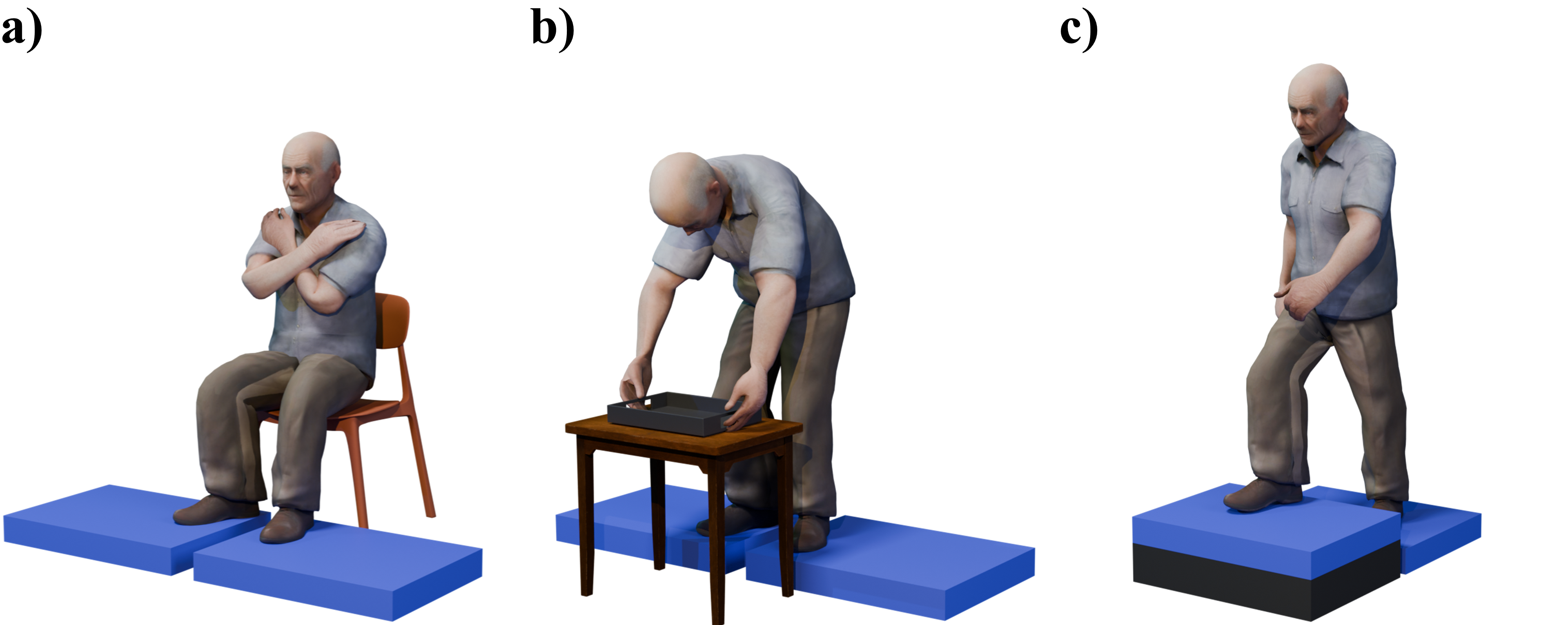
The evaluation uses four functional tasks—5-times Chair Stand, Chair Stand, Pick-Up, and Step-Up—chosen as simple, safe movements that reflect daily function in older adults.
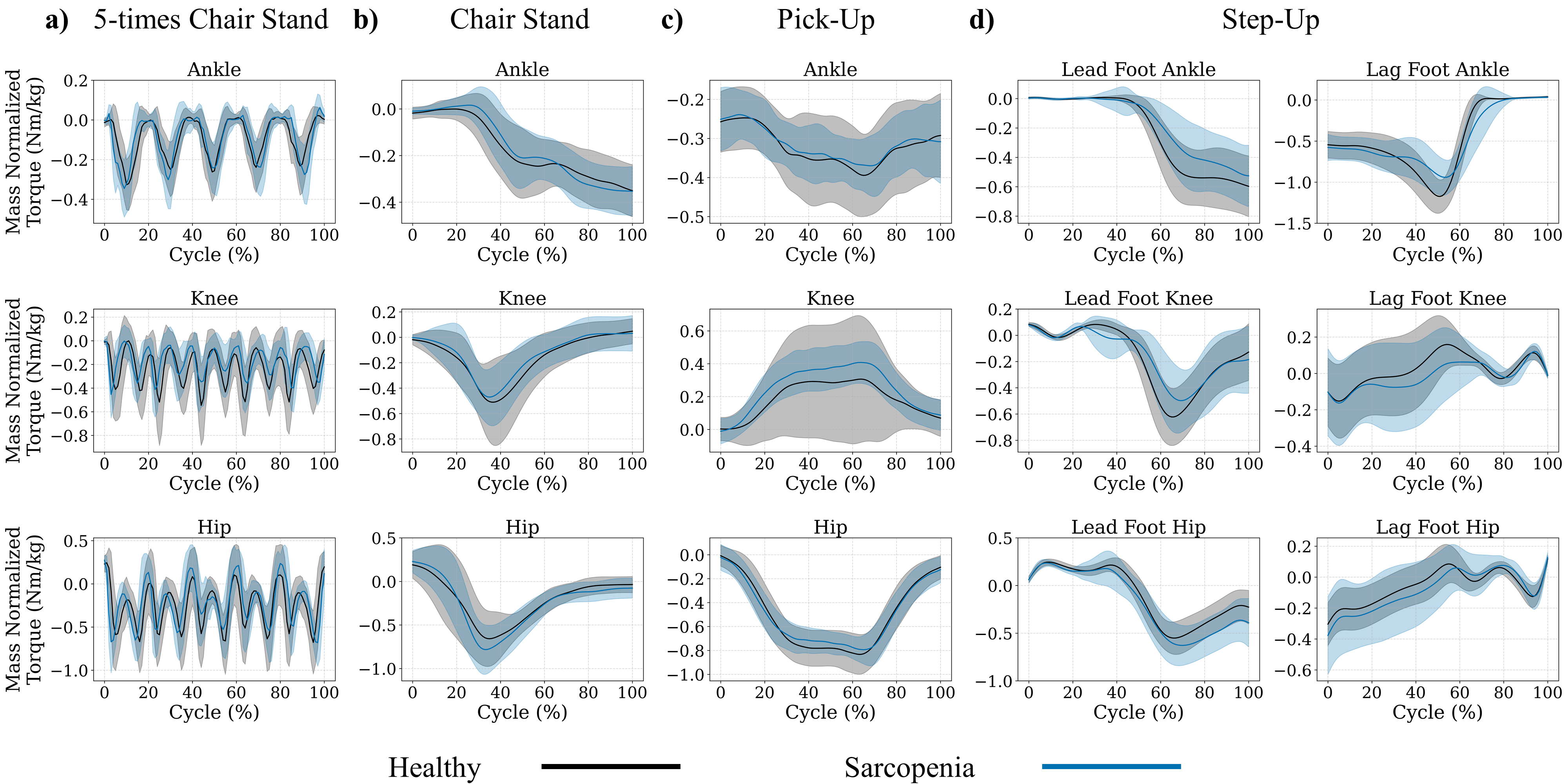
Figure 9 compares ankle, knee, and hip torque profiles across tasks in healthy and sarcopenic groups, highlighting task-specific functional deficits and compensatory patterns.
Selected implementation-related figures from the paper and appendix focus on the CoP-Limiter and the motion-based GRF-estimation pipeline implemented in this repository.
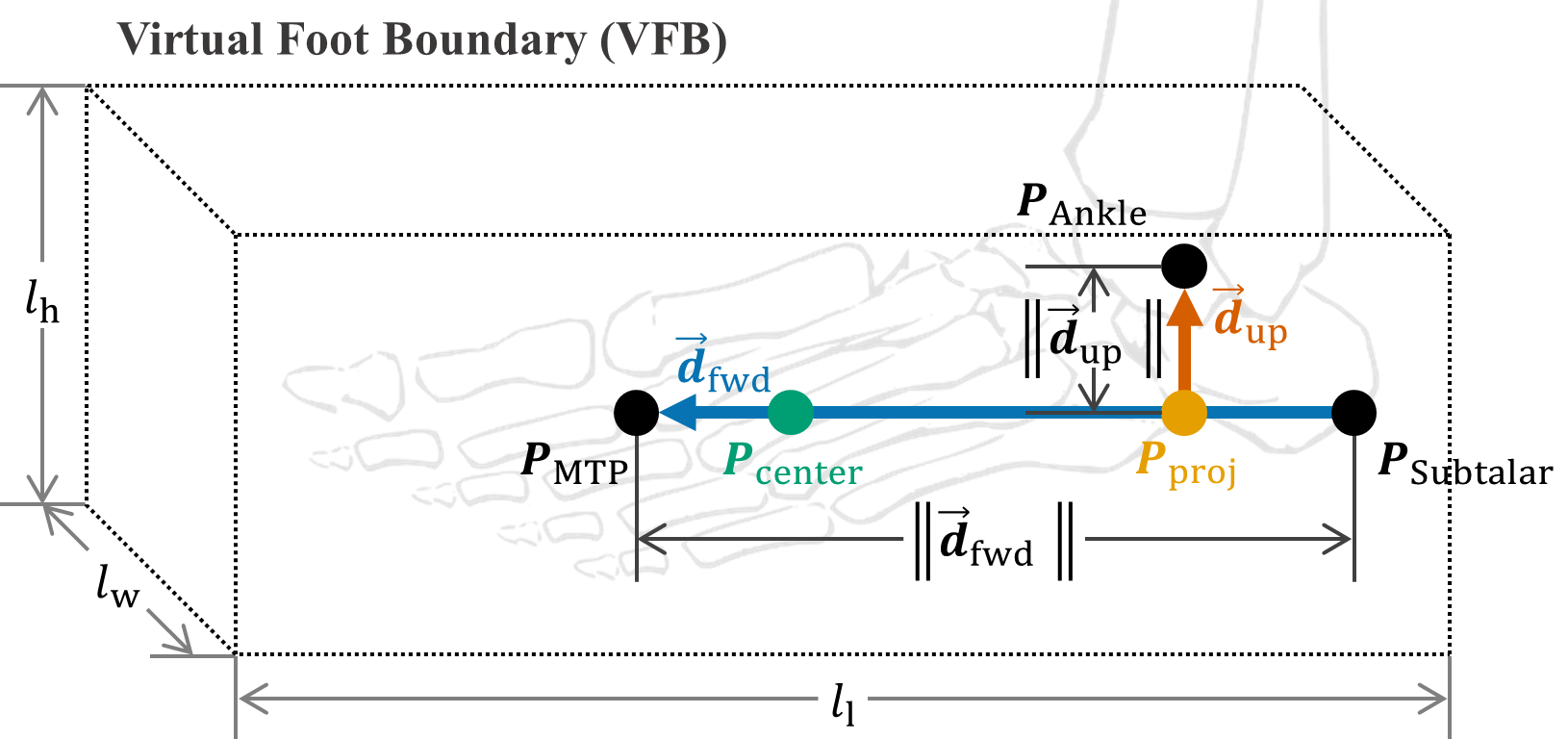
Figure 4 describes the Virtual Foot Boundary (VFB), which defines the physically plausible support region used by the CoP-Limiter.
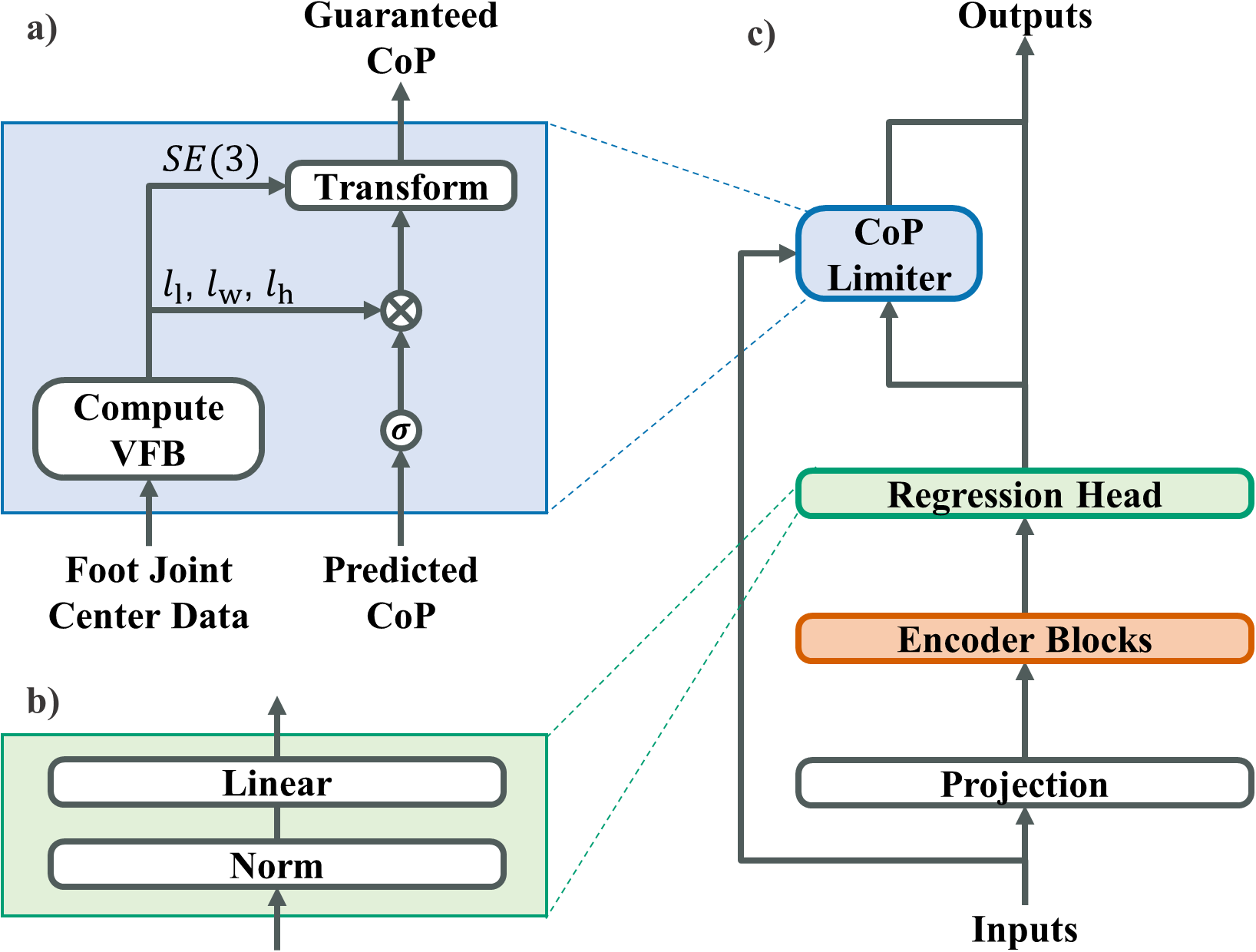
Figure 5 shows the GRF-estimation model, including the CoP-Limiter, the regression head, and the overall pipeline used in the implementation.
Figure 11 compares the Baseline (BL) and CoP-Limiter (CL) models with Transformer, showing Ground Truth in red, the estimated GRF in blue, and the VFB in green. The CL model keeps the CoP inside the VFB more consistently in both validation and unseen test examples.
If this project is useful in your work, please cite the paper and refer to this repository as the implementation companion.
@article{jo2026joint,
title = {Joint torque estimation from daily living motion for passive sarcopenia monitoring in older adults},
author = {Jo, Jaebeom and Kim, Kihyun and Kang, Min-gu and Ryu, Kanghyun and Ha, Junhyoung and Kang, Jiyeon},
journal = {Journal of NeuroEngineering and Rehabilitation},
year = {2026},
doi = {10.1186/s12984-026-01962-3}
}