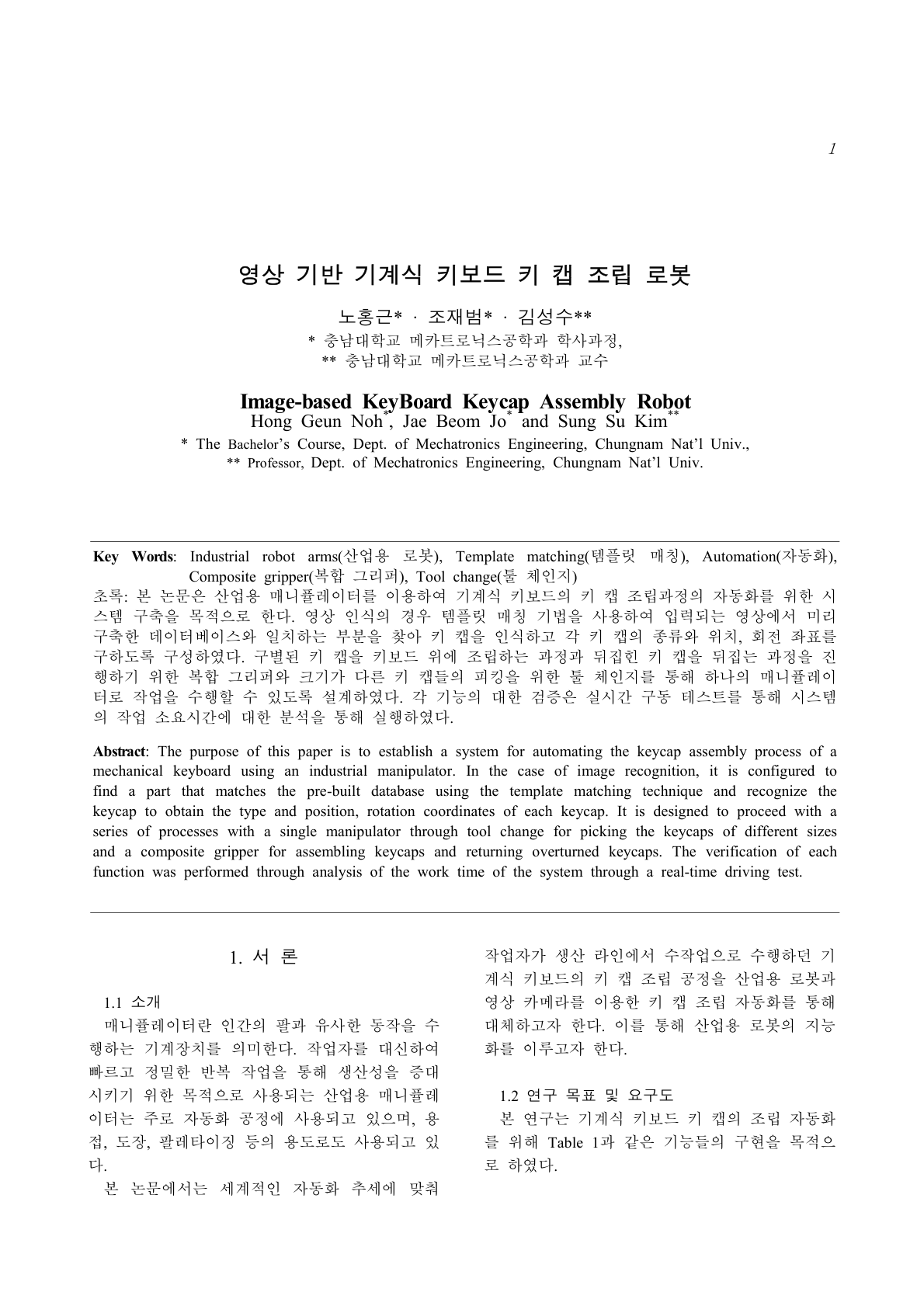
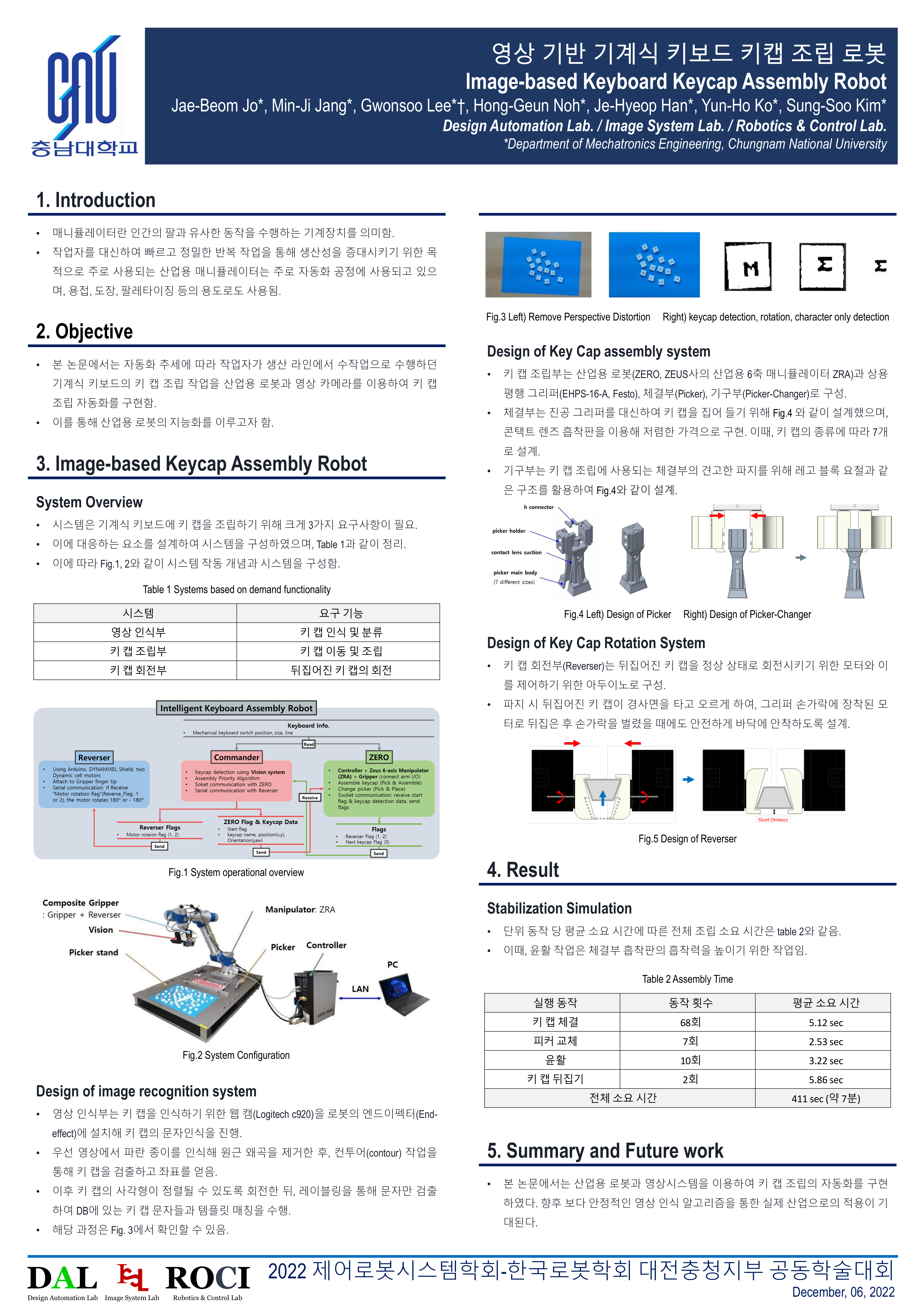
영상 기반 기계식 키보드 키캡 조립 로봇
Image-based Keyboard Keycap Assembly Robot
Jae-Beom Jo, Min-Ji Jang, Gwon-Soo Lee, Hong-Geun Noh, Je-Hyeop Han, Yun-Ho Ko, Sung-Soo Kim, ICROS-KROS Daejeon Chungcheong Branch Joint Academic Conference, Daejeon, Korea, Dec. 2022.
Abstract
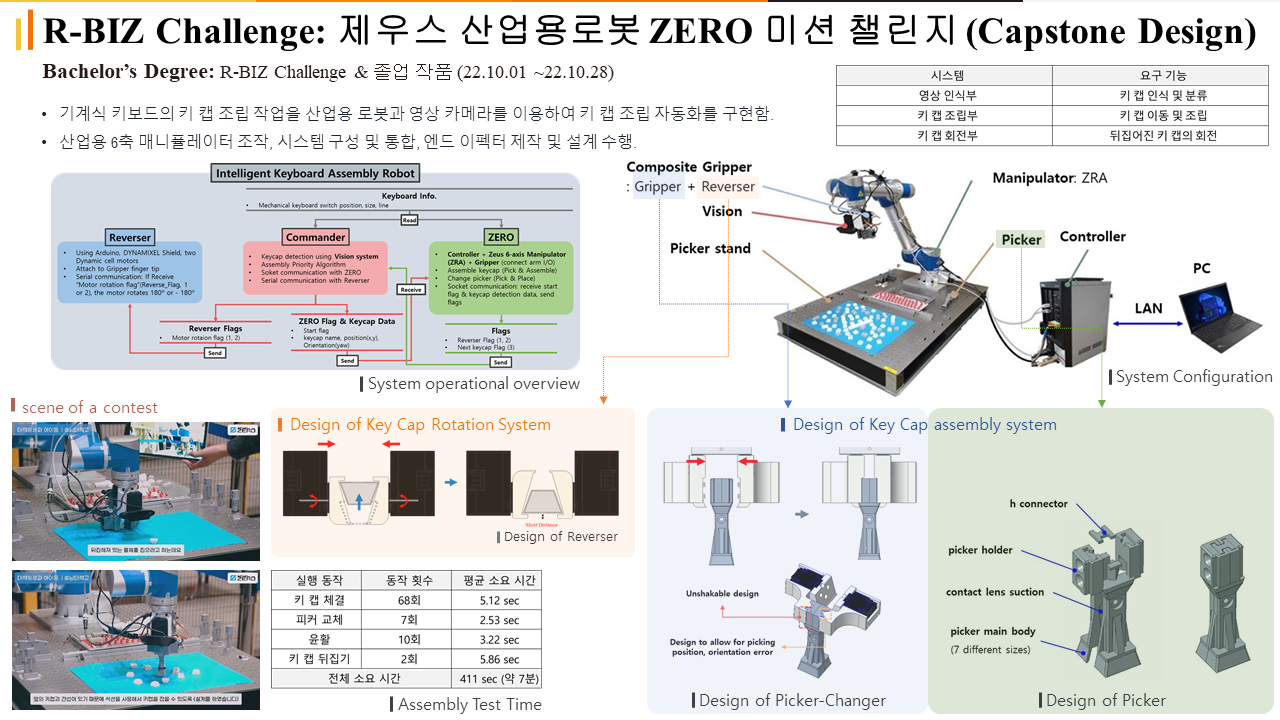
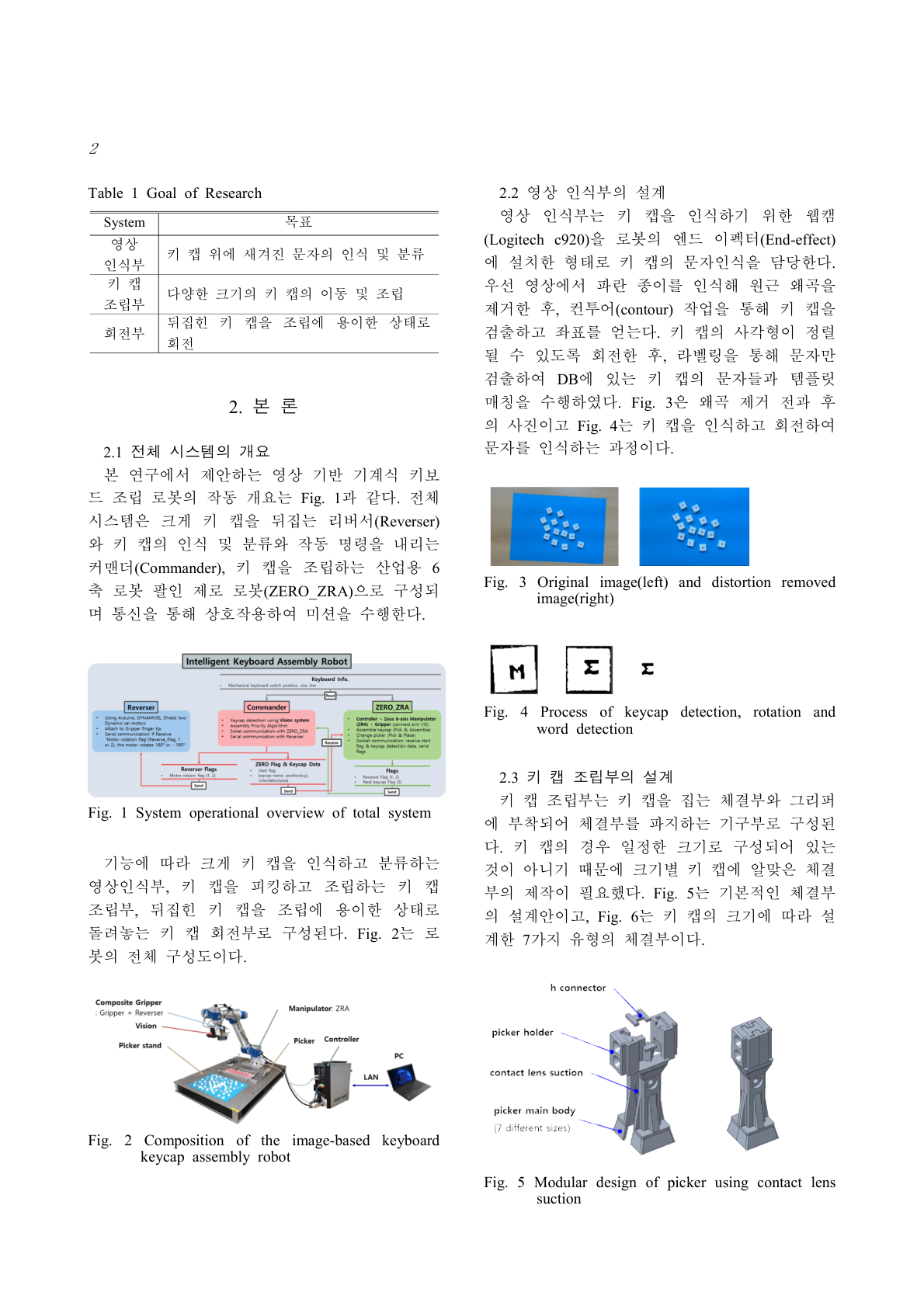
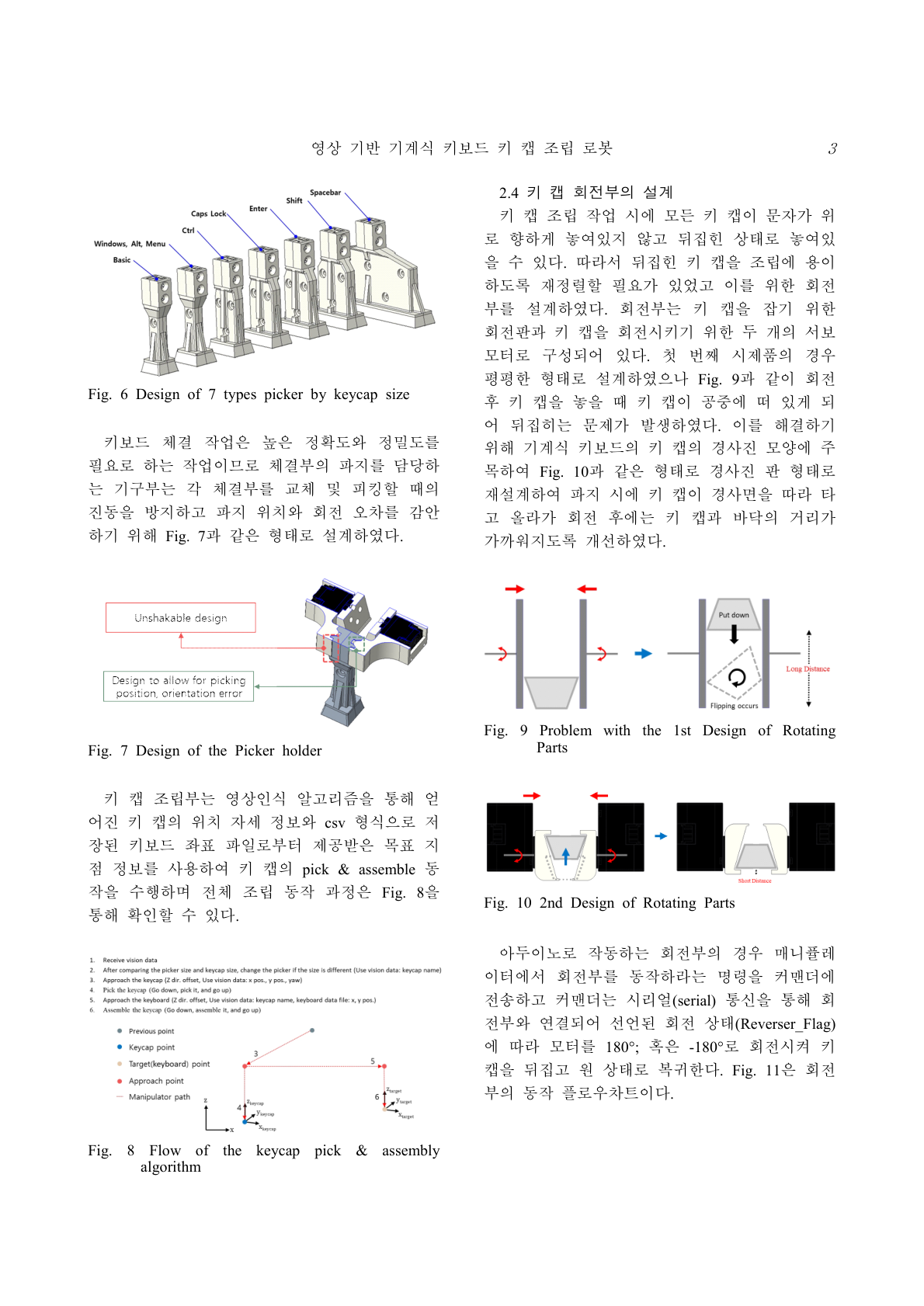
Vision-based robot assembly can reduce the need for fixed mechanical fixtures by allowing the robot to identify object positions from camera images. This presentation developed a keyboard keycap assembly robot for the R-BIZ ZERO Mission Challenge. The system recognized keycap locations using image processing, generated robot motion commands for pick-and-place assembly, and used a suction-based end-effector to place keycaps on the keyboard. The project also identified practical constraints in lighting robustness, suction stability, and task-cycle time during competition operation.
Paper
Poster
Citation
@inproceedings{jo2022keycap,
title = {Image-based Keyboard Keycap Assembly Robot},
author = {Jo, Jae-Beom and Jang, Min-Ji and Lee, Gwon-Soo and Noh, Hong-Geun and Han, Je-Hyeop and Ko, Yun-Ho and Kim, Sung-Soo},
booktitle = {Proceedings of the ICROS-KROS Daejeon Chungcheong Branch Joint Academic Conference},
address = {Daejeon, Korea},
month = dec,
year = {2022},
note = {Poster}
}