LinkedIn post describing the RecurDyn simulation competition work and robotics/CAE context.
Competition
Mobile Shopping Robot
2021 RecurDyn Simulation Contest
Competition · Jul. 2021 ~ Aug. 2021 · First Prize
2021 RecurDyn Simulation Contest / FunctionBay Inc.
Overview
Overview
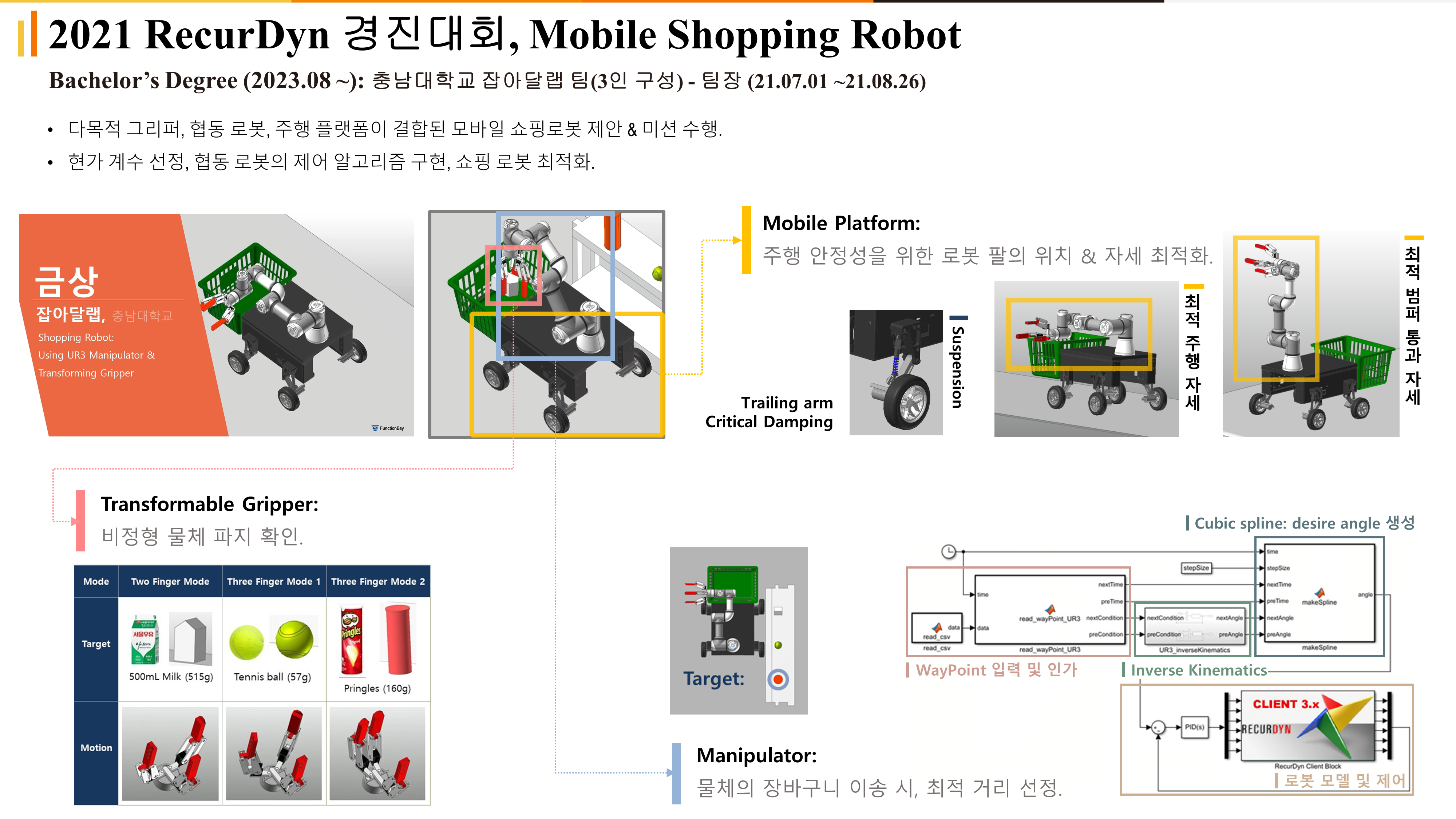
This competition project designed and simulated a mobile shopping robot mission using RecurDyn. The robot had to move through the course, grasp target objects with a manipulator, transport them while maintaining vehicle stability, and complete the mission under dynamic constraints.
The project focused on multibody dynamics modeling, contact/coefficient tuning for grasping, manipulator motion control through MATLAB co-simulation, and motion-sequence optimization for stable driving over bumps. The work received First Prize in the 2021 RecurDyn Simulation Contest.
Contributions
Contributions
- Led the CNU Mechatronics “잡아달랩” team as team leader for the RecurDyn Simulation Contest.
- Defined gripper contact coefficients for grasping irregular objects in the simulation environment.
- Controlled a 6-axis manipulator through RecurDyn-MATLAB co-simulation.
- Optimized object-transfer distance and arm posture to improve driving stability over bumps.
- Organized the mission sequence, simulation execution, and final project presentation material.
Related Materials
Related Materials
Select a material.
RecurDyn Mobile Shopping Robot mission video.
Video
FunctionBay posting for the 2021 RecurDyn Simulation Contest result.