ROS를 활용한 실시간 로봇 동역학 모델 가시화
Real time Robot Dynamics Model Visualization Using ROS
Jae-Beom Jo, Chang-Ho Lee, Sung-Soo Kim, KSME Spring Meeting, Suwon, Korea, Apr. 2022.
Abstract
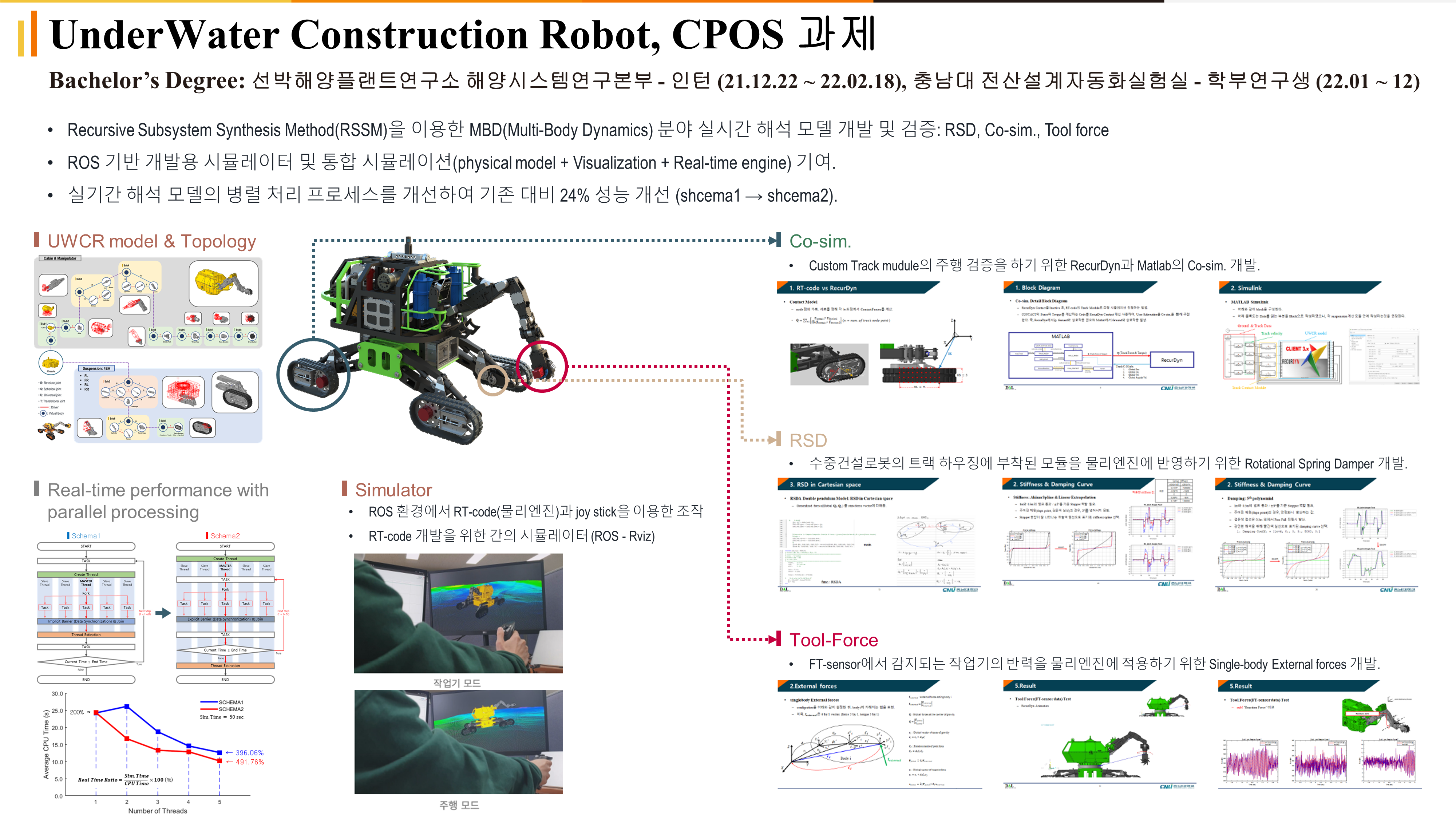
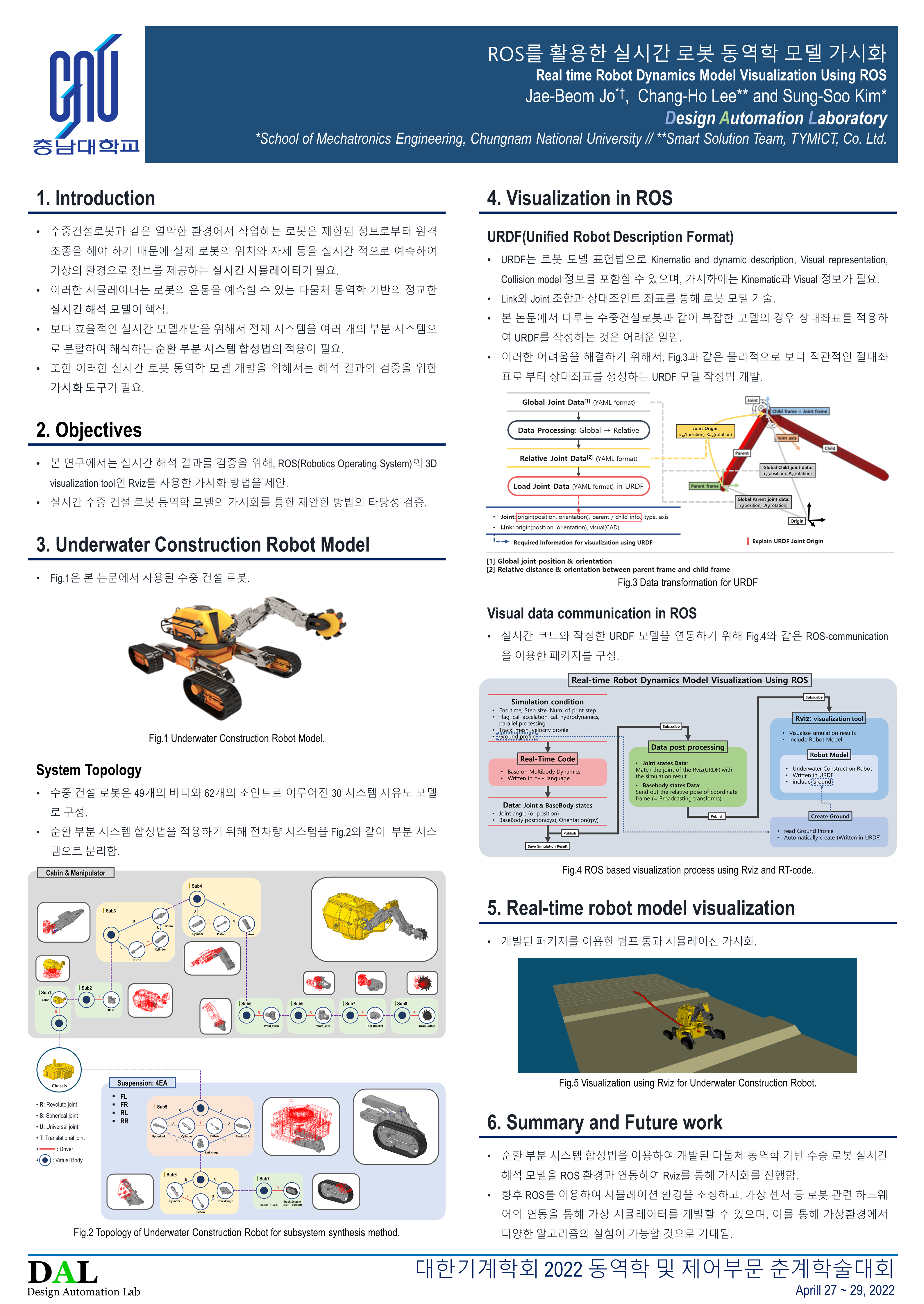
Real-time simulators for underwater construction robots require accurate dynamics models as well as visualization tools that can expose robot position, posture, and state information during operation. This presentation proposed a ROS/RViz-based visualization workflow for a real-time underwater construction robot dynamics model. The method transformed robot model information into visualization-ready descriptions and connected real-time simulation results with RViz so that the model behavior could be inspected and validated during simulation.
Poster
Citation
@inproceedings{jo2022ros,
title = {Real time Robot Dynamics Model Visualization Using ROS},
author = {Jo, Jae-Beom and Lee, Chang-Ho and Kim, Sung-Soo},
booktitle = {Proceedings of KSME Spring Meeting},
address = {Suwon, Korea},
month = apr,
year = {2022},
note = {Poster}
}